前回、必要な部品は全て紹介したので後は組み立てるだけです。下図が回路図ですので、この通り接続すれば完成です(追記2021/5/8 2軸用ですが、リレーを使わない回路図を作成したので、そちらも参照して頂くのがよいと思います。追記2023/02/23 最新はこちらです)。

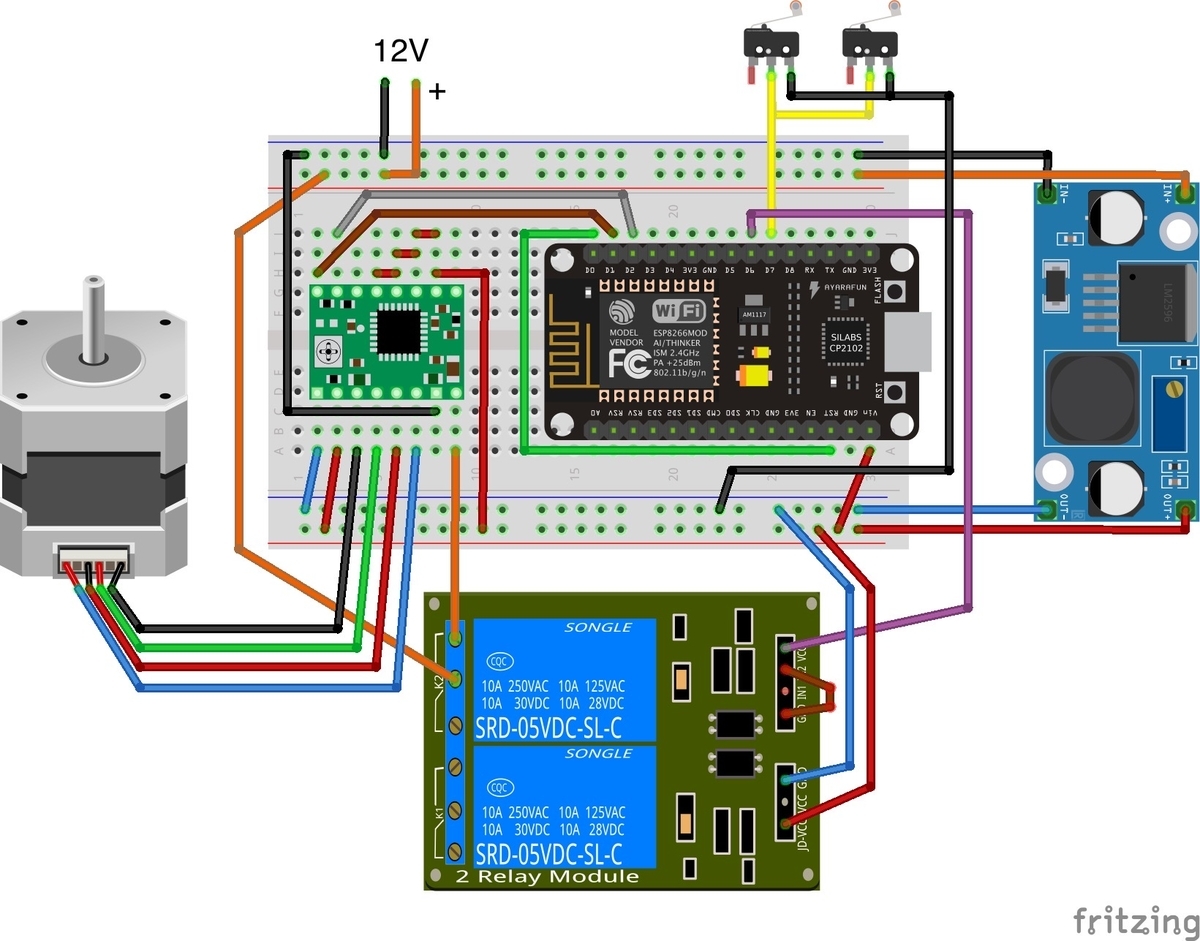
回路図
図中の12V のところにバッテリーを接続すれば良いです。12V と書きましたが、24V構成の場合には24Vでも、問題ないはずです。なお、もっと低い電圧、例えば ESP8266 の駆動電圧と同じ5V でもステッピングモーターは動くのですが、その代わり多くの電流が流れます。するとモータードライバーが発熱してしまうので、12V以上の方が良いです。
この12Vから右側の定電圧電源で ESP8266の駆動電圧5Vを得ます。定電圧電源の可変抵抗で5Vになるように調整し ておきます。
左側のモータードライバーのA4988の可変抵抗でステッピングモーターに流れる電流を調整します。まず、可変抵抗を時計と反対に回し切っておき、モーターを回転させる信号を送っている状態で、可変抵抗を時計回りに回していくとモーターが動き始める点があります。それがモーターが動作する最低電流の位置になります。実際に組み上げた後に、このようにして、架台が動く最低電流になるように可変抵抗を調整すれば良いです。
なお、ステッピングモーターはバイポーラを使用していますので、モノポーラを購入しないように注意してください。なお、あまり小さい(表現が適当ですみません)とトルクが足りなくて架台を回せなくなる可能性があるのでご注意ください。もし架台が動かない場合には、昇圧電源で電圧を上げてやれば動くかもしれません。
リレーは2連になっていますが、1つしか使っていません。2つ目は将来、垂直にパネルを動かすために使う予定です。
なお、ESP8266のRSTピンとD0ピンが接続されていますが、これは deep sleep からの復帰時にリセットをかけるためのものです。プログラムの書き込み時にこれを接続していると書き込めないので、外した上で書き込みを行ってください。